











微型射流激励器的流场矢量化测量
概述
粒子成像测速仪用于测量亚声速射流的近场中心平面速度,出口直径为3.81cm,使用单流体和双流体激励器实现流动控制,每个流体激励器的等效直径为1.06mm。
流体激励器使用流体逻辑电路在喷射和剪切层中产生震荡速度/压力扰动,用于延迟分离,增强混合和抑制噪声。
流体激励装置能够控制剪切流的潜在原因如下:
它们没有移动部件,可以产生在频率,幅度和相位上可控的激励,它们可以在恶劣的热环境中工作,不易受到电磁干扰,并且很容易集成到可以运行的设备中。微型流体激励器的示意图如图1所示。
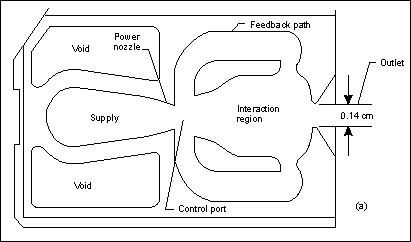 图1 Bowles Fluidics制造的微型流体喷嘴的内部结构
图1 Bowles Fluidics制造的微型流体喷嘴的内部结构
系统结构
装置使用了一套具有激光源,数字成像设备以及用于数据分析的专用硬件和软件的PIV 2200系统。激光源是二倍频的双腔Nd:YAG激光器,其工作波长为532nm(每脉冲50mJ),脉冲频率为15Hz。使用可聚焦的片光源将重叠的中心光束扩展成20度角的发散片光。在测量点处,片光厚度约为1mm,并且在射流出口处照射轴平面。通过具有1008×1018像素分辨率的8位双帧CCD相机完成一对粒子图像的记录。中心波长在532nm(±15nm)处的带通滤波器放置在相机镜头的前面,以消除白光照射对所获取图像的影响。
测量细节
使用自适应互相关技术在线完成图像的处理以导出矢量图。这是一种多步迭代算法,其中来自先前步骤的速度信息用于改进下一步的矢量位移预估,该改进方法利用了逐渐减小的询问区域,因此可以增加速度梯度的分辨率而不损失动态范围和信噪比性能。
使用雾化器产生射流示踪粒子,其产生大约1-2µm大小的液滴。对于每次测量,收集50-70个图像以评估平均速度特性。设定脉冲之间的时间间隔,以便产生64×64像素询问区域长度的20%-25%的最大粒子位移。选择了16×16像素的最终询问区域。峰值验证和移动平均技术用于在计算过程的每个步骤消除无效向量。
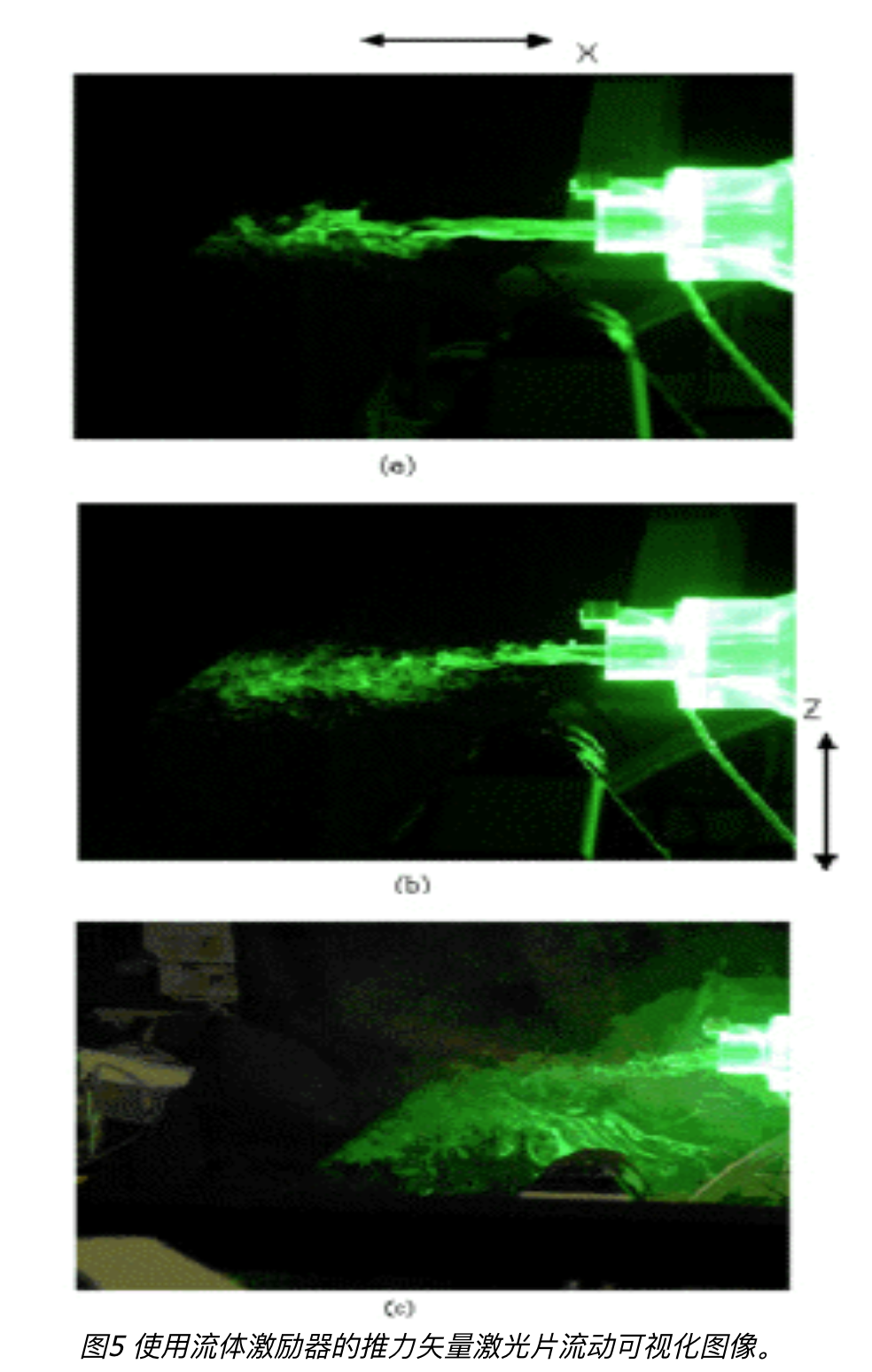
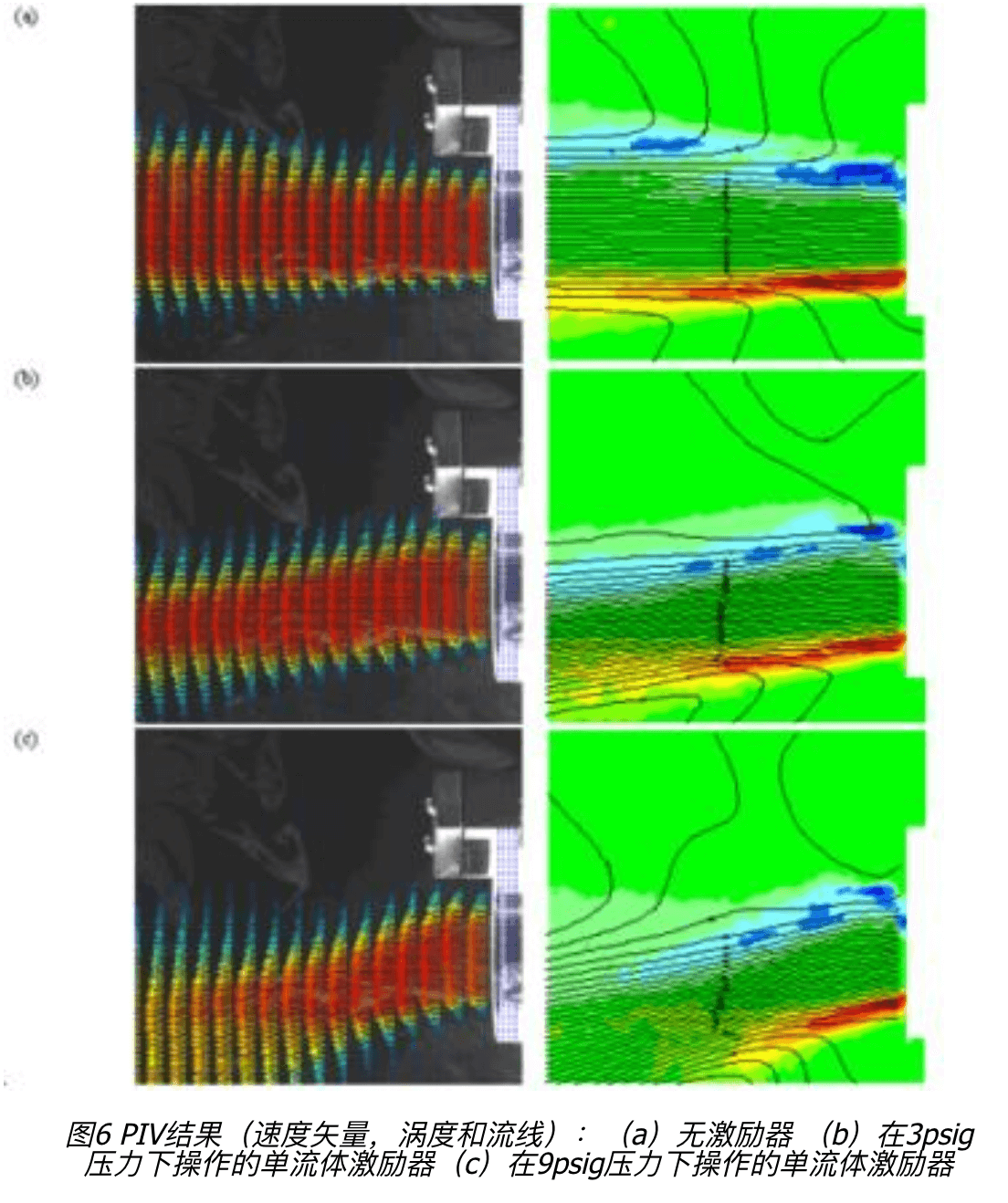
(a)无控制。
(b)在工作压力为3psig(质量流量=1.84 x 10-5 Kg / s)下运行的单流体激励器。
(c)在工作压力为6 psig(质量流量= 5.39 x 10-5 Kg / s)下运行的单流体激励器。注意:流体激励器安装在亚音速喷嘴的顶部。
参考文献
Ganesh Raman, Selvam Packiarajan, George Papadopoulos, Clifford Weissman, and Surya Raghu
"JET THRUST VECTORING USING A MINIATURE FLUIDIC OSCILLATOR,"
ASME FEDSM 2001-18057, 2001 Fluids Engineering Division Summer Meeting, New Orleans, Louisiana May 29 - June 1, 2001.