











在混合桶里的相位解析PIV测量
测量目标
为了证明无干扰全局测量技术在研究粘性搅拌罐系统存在的复杂流动模式中的可用性。
测量背景
全球光学诊断技术的最新进展,如粒子图像测速仪(PIV),在流动测量方面具有很大的优势,如精度,无干扰性,全局性,实时性,高空间分辨率等。
PIV测量能够被用于:
- 验证CFD预测结果
- 通过指导选择罐几何形状以及叶轮的类型,尺寸,放置位置和转速等过程来优化搅拌罐设计
- 在批量或连续操作的搅拌罐中选择添加或去除流体的最佳位置
一直致力于研究粘性搅拌罐系统中的流动,无论是在实验上还是在计算上,都强调:
- 粘性搅拌槽流的高度复杂性和全三维特性
- 需要全局测量技术来研究和验证此类流动的CFD代码预测
- 绝大多数先前用于研究类似流动的实验技术是有干扰的(皮托管,热膜探针),单点研究(LDA)或定性(流动可视化技术)研究。
使用激光照射的搅拌罐
 | 铸造丙烯酸圆形罐:
工作流体:
示踪粒子
折射率匹配充满甘油的罐的矩形外壳。 |
仪器设备
Dantec Dynamics PIV系统包括:
- 一个50 mJ的双腔迷你Nd:YAG激光器
- 8位双帧CCD相机,分辨率为1008 x 1018像素
- 标准的60毫米尼克尔微距镜头可以看到3 x 3英寸的区域
- 高通滤色镜(> 570 nm)
- 用于基于FFT的在线相关分析的专用硬件
- 计算机控制的垂直移动坐标架,分辨率为7.5微米
- 用于锁相测量的控制和同步模块
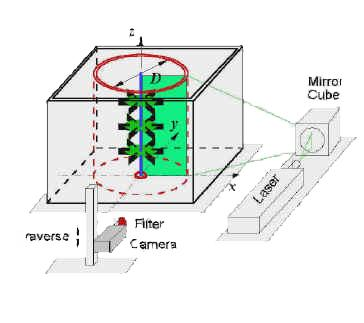 搅拌罐和PIV装置的示意图
搅拌罐和PIV装置的示意图
储罐搅拌器
使用三个Rushton涡轮机,每个涡轮机具有六个矩形径向叶片,以搅动流动。Rushton涡轮机沿着容器的高度等距间隔,高度间隔为60mm,最低的Rushton涡轮机位于距离油箱底部60 mm的高度,中间轴的高度为255 mm,直径为8mm。
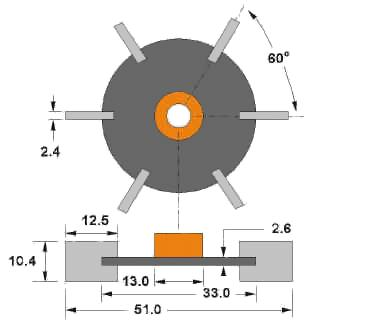
Rushton 涡轮几何结构
数据处理方案
相机双曝光图像捕获
图像查问域(32 x 32像素)
查问域域重叠率50%
使用在线互相关以产生矢量图,每个PIV实现包含总共62×62个矢量(3844)
使用峰值和移动平均值验证原始矢量图
每个位置共获得50个PIV图像
每个呈现的矢量图对应于50个经验证的矢量图的平均值
测试条件
测量在两个旋转速度,175RPM和575RPM下进行,对应于雷诺数38和124
来自集成在搅拌器中编码器的信号用于锁相PIV采集
集成在PIV处理器的高级同步模块中的可编程延迟发生器使得能够在一个叶片通道周期内改变相对采集相位
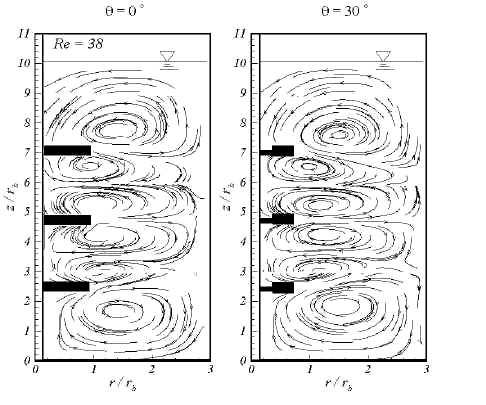
针对每个旋转速度研究该循环内的两个阶段,对应于相对叶片的q = 0o和30o,当叶片平行于激光片时q = 0o。
测量结果
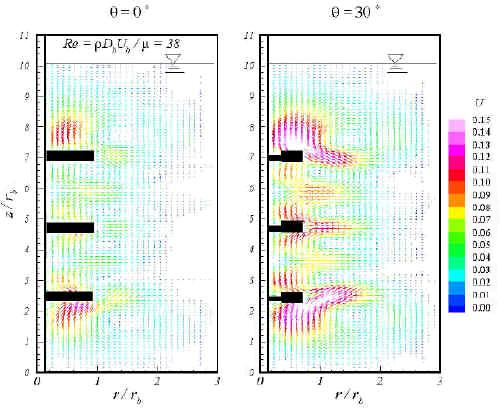
低转速情况下0和30度的矢量图
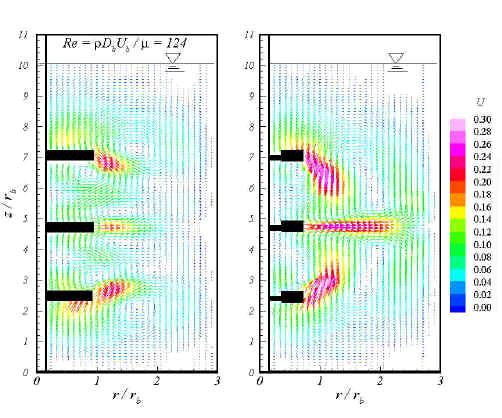
高转速情况下0和30度的矢量图
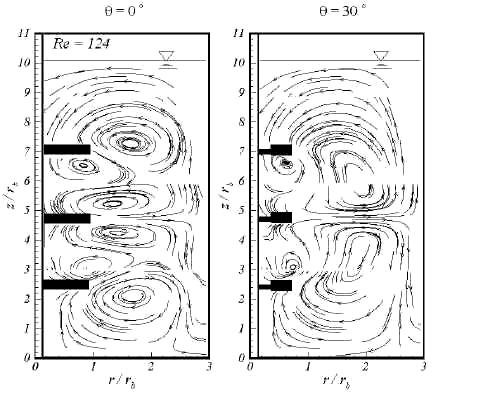
在高RPM下0和30度的流动痕迹,显示了再循环的分离区域
参考文献
Khaled J. Hammad and George Papadopoulos, Phase-Resolved PIV Measurements in a Stirred Tank, paper presented at AIChE 2000, Nov. 12-17, 2000, Los Angeles, CA, USA.